Thy løber ræveløb på 80m som resten af verden
 Senderne er PIC-styrede og skulle give 4w, er med præjusteret antennetuner.
Senderne er PIC-styrede og skulle give 4w, er med præjusteret antennetuner.
Selve senderprintet er færdig købt ved DL4CU's.
Når stikket med antenne sættes i, tændes senderen.
Alle sender aktiveres samtidigt,og timeren bliver sat. Så
er det bare at ligge rævene ud, sætte
jordspydet i, og få antennen anbragt. Der er ingen justering
eller
sykronisering af tiden. Det betyder, at rævene hurtig kan
ligges ud, - det skal jo også være nemt for dén, der
laver
løbet!

Senderen er monteret i en standard plastkasse, sammen med en almindelig, billig akkumulator på 12V.

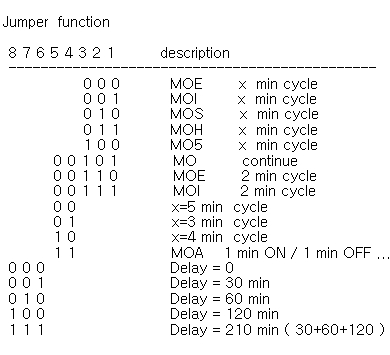
Senderne programmeres meget enkelt med dipswitsene, som ses i tabellen.
Når der er strøm på ræven, er der en ringe tryk
på kassen. Når man aktiverer den første gang, helst
begge kontakter samtidigt, er alle ræve synkroniseret.
Derpå tager man alle ræve sig med og anbringer dem
forskellige steder i
skoven. Det er ikke nødvendigt at spekulere på
starttidspunkt og
rævens nummer. Ræven gemmes, antennen anbringes højt
og jordspydet sættes i, og dernæst finder man et sted til
den næste ræv.
Denne PIC-timer egner sig til automatisk styring af en 80m eller 2m
ADRF sender. Den frembringer identifikation MOE … til MO5.
Tilbagesignalet MO og en i minuttakt arbejdende MOA retur. Den kan
sende 1 – 2 – 3 – 4 – eller 5.
Indstillingger.
Der kan ydermere vælges en forsinket start fra 30 min. til
3½ time. Efter man ved hjælp af DIP-kontakten har valgt
den ønskede fremgangsmåde, overtager timeren værdien
når, spændingen sættes. For at
synkronisere flere ræve skal alle trykkes på samtidigt. Den
pågældende LED skifter dermed fra en 0,3 sek. til en
1 sek. blinkrytme. En gentagelse af synkroniseringen er ikke
mulig. I det tilfælde skal ræven tændes på ny.
Ved at at aktivere tasten igen, bliver senderen aktiveret så
længe, som knappen holdes nede. Derved har man mulighed for
eventuelt at teste senderen
efter den er lagt ud.